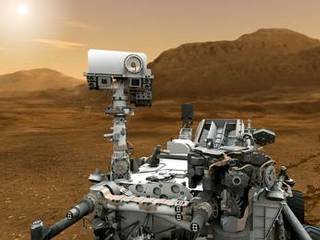
NASA's Curiosity rover continues its mission on Mars, reaching Sol 24 and preparing to test new software that will enable it to navigate autonomously. The highlight of the Sol 24 plan is the testing of this software, which will allow the rover to automatically avoid obstacles. If successful, Curiosity will be able to drive further towards its destination, Glenelg, where it can study the relationships between different geological units. The plan also includes time for scientific observations. However, there is a possibility that the data volume expected to be relayed by the Mars Reconnaissance Orbiter may not be sufficient to return the images needed for another drive, in which case the rover will have to remain stationary for a sol. In addition, the last of the Mastcam characterization data has been acquired, enabling new Mastcam observations [27af98e9].
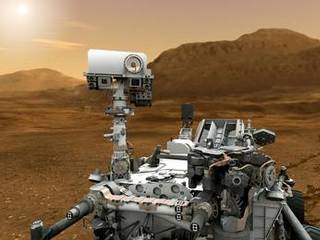
Ken Herkenhoff, a planetary geologist at USGS Astrogeology Science Center, provided an update on the Curiosity rover's activities on Sol 13. The tactical planning team was able to include more scientific observations in the plan for the day. Herkenhoff, who usually works as the science lead for the Microscopic imager, served as the SOWG Chair and led the science team for the day. The SAM instrument checkout planned for Sol 14 had to be spread over two Sols due to the need to confirm the results of the first part on Earth before proceeding with the second part. To avoid spending an extra sol, the first part of the checkout was moved into the Sol 13 plan. Herkenhoff completed his four shifts as SOWG Chair and expressed his excitement for the opportunity to serve in that role. He is looking forward to getting more sleep, catching up on other work, analyzing the data received from MSL, and attending the Science Discussion meeting [57d0921b] [68430dfc] [93aa2c41].
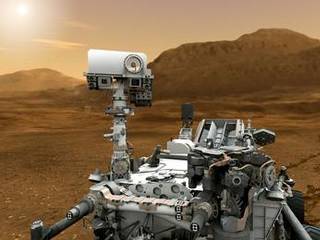
In a recent update on Sol 36, Ken Herkenhoff discusses the progress of the MSL arm checkout. The Alpha Particle X-ray Spectrometer returned its first data, and MAHLI images were planned to verify the arm's accuracy in placing itself over the inlets for Chemin and SAM. Mastcam 'sky flats' images were also planned to measure variations in the camera detectors' response across their field of view. The article mentions the difficulty of using this technique for the MSL cameras due to their larger fields of view and visible variations in brightness across the sky. The plan includes a small mosaic of images around a central image that will be corrected for these variations. The Navcams were also added to the plan for calibration using the Mastcam observations. The article mentions the shift in 'Mars time' relative to PDT and the author's experience with morning rush hour traffic. The author's shift starts just before midnight and ends at 10:15 AM PDT. [323f082c].
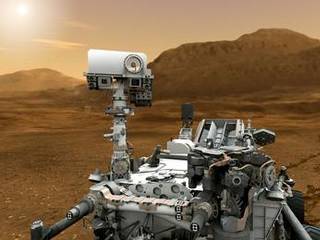
In the latest Sol 27 update by Ken Herkenhoff, the focus of the plan is primarily the first sampling of Mars' atmosphere by the SAM instrument. ChemCam is working again, and the top priority is to acquire better observations of its calibration target. The science team wanted to take pictures and zap the new outcrop target with ChemCam's laser. Additional time was added to the plan for more scientific observations. Mastcam and ChemCam observations of the outcrop were included in the plan. Ken Herkenhoff spent most of his day at JPL and processed new MARDI images to determine how much they can be compressed. He also analyzed older ChemCam RMI images taken in the MSL testbed to test various types of image compression. The analysis shows that the size of these images can be reduced without significantly degrading them. The analysis needs to be completed soon to make the most of the precious bits received from MSL through the Mars orbiters [a4e4f8d5].